I have a multi-zone ductless mini-split system installed in my house, which has been a fantastic addition and does a great job with keeping the house comfortable. Though the limitation of all zones having to be in the same mode because the compressor unit outside can only do one mode at a time.
This leaves a coordination task, as temperature set points change through the day to save energy, and mode switches move between heating and cooling as the weather changes, particularly in the spring/fall transition seasons when daytime temps could require cooling, and nights still need heat.
It’s certainly possible to manage this with the individual remotes for each zone, but it can get to be annoying to tweak all the zones a couple times a day. I decided to build a ESP32 based IR controller with a central control and schedule to ease the task.
I also took it as an opportunity to experiment with some small E-Ink displays, which are well suited to long term, low power, battery operation for the remotes.
As I was building a half dozen devices, it was a great choice for assembly with my pick and place machine I’ve written about before.
Finishing out the assembly, attaching the display and battery, and 3D printing a case for the unit wraps the project into a neat little package.
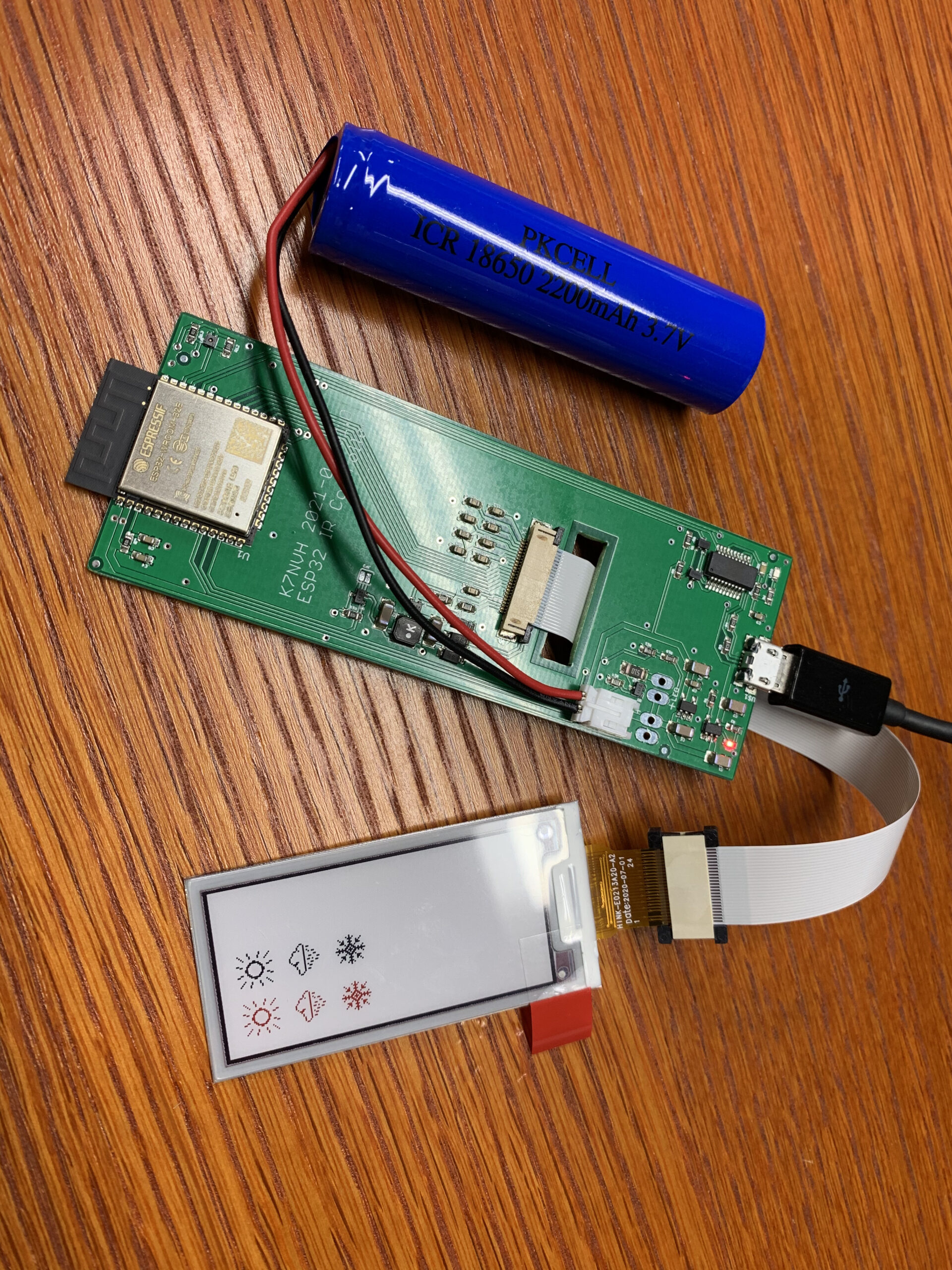


Each unit sleeps at low power using only 10uA, waking up every 15 minutes to report sensor data, check the schedule with the control system, and if scheduled send an IR command emulating the factory remotes. Overall the 2000mAh battery lasts about three months between a recharge.
The factory remote protocols were reverse engineered using my Saleae Logic analyzer, and when available docs others have written about the same or similar devices.