
2019’s launch included a single balloon which reached 101,433 feet. The flight carried carried a number of student payloads, the 900MHz voice telemetry system, a commercial APRS tracker board, my custom IRIS board, as well as a Raspberry Pi Zero W with a Camera V2 module, and a new experimental tracker based on the LoRa boards from Enhanced Radio Devices.
The APRS systems are our tried and true trackers, which consistently have provided solid performance for our flights, and got us a good position packet at about 2000′ above the ground during the descent which gives us a nice narrow search area, as it won’t drift very far during that time. In the case of this flight, final landing position was just a bit under 300 yards from that last airborne position. APRS has the advantage of having multiple listening stations, some of which are high up, which provides good coverage for packets we may not necessarily hear from the launch site. The downside is that other folks use APRS, and we have to share the channel, which means limiting the interval we transmit positions on.
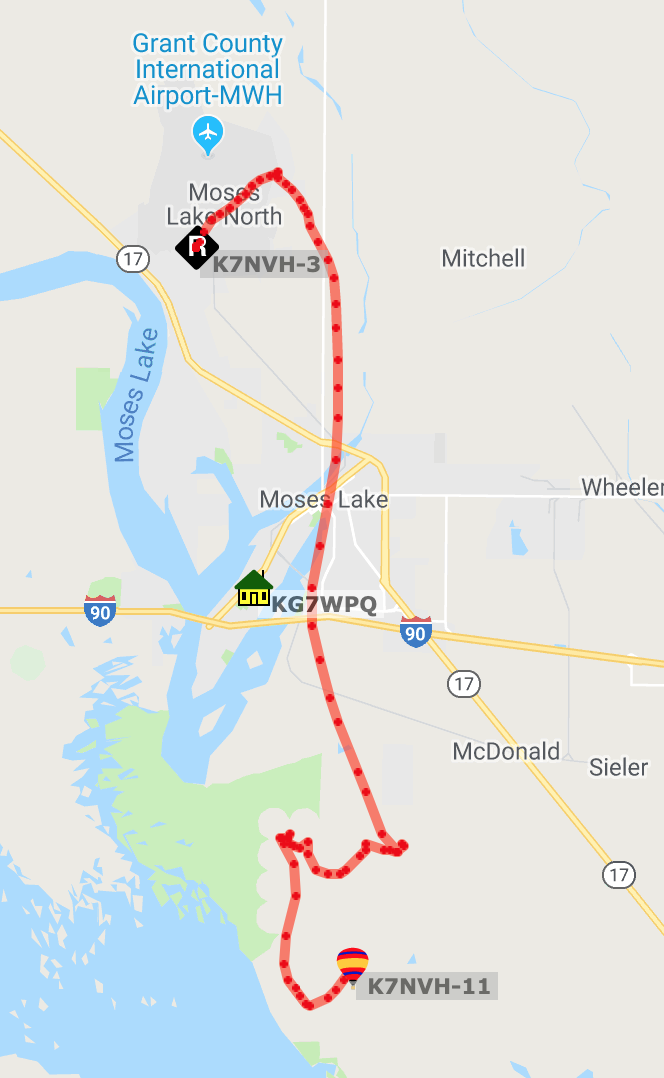
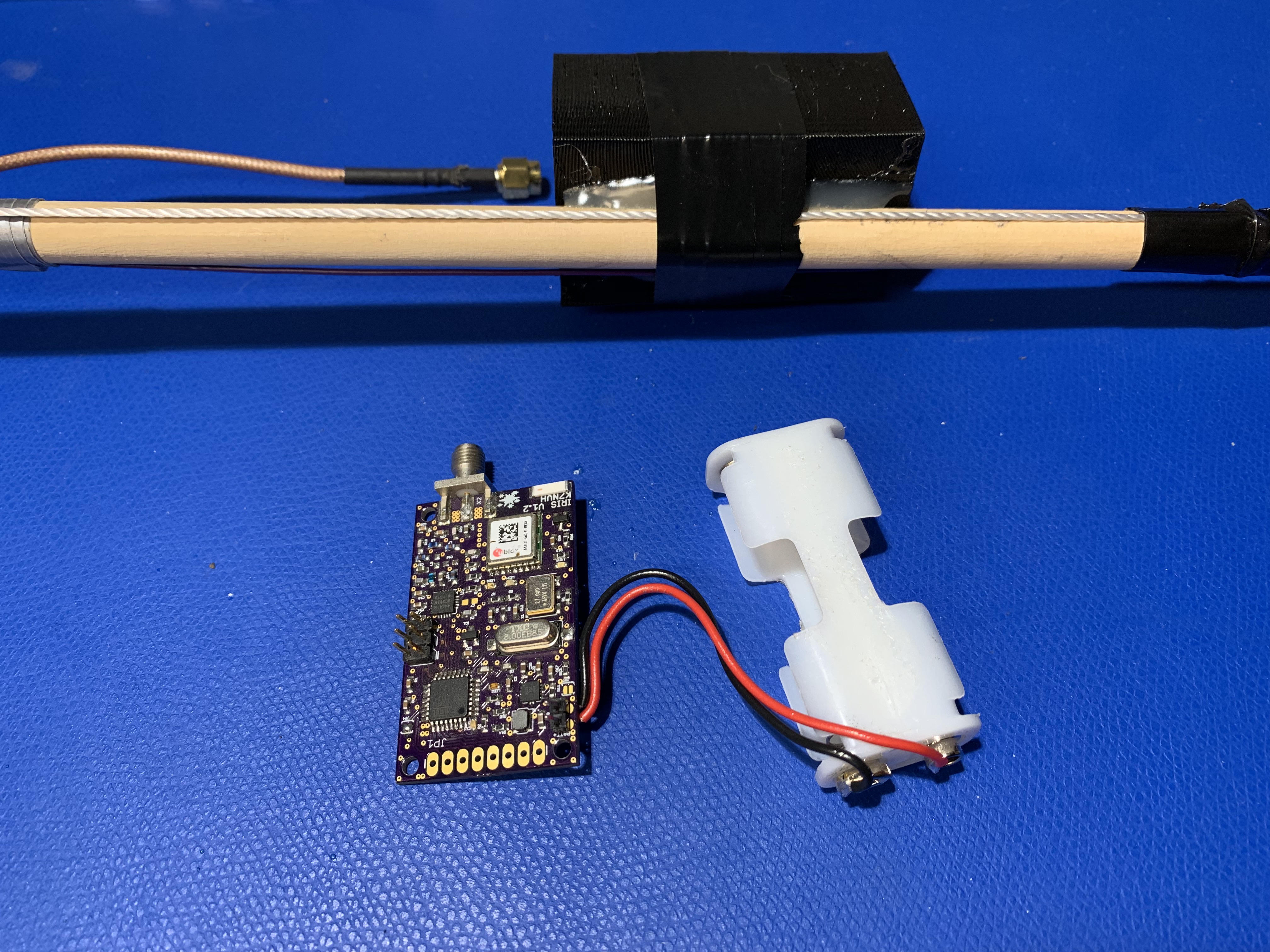
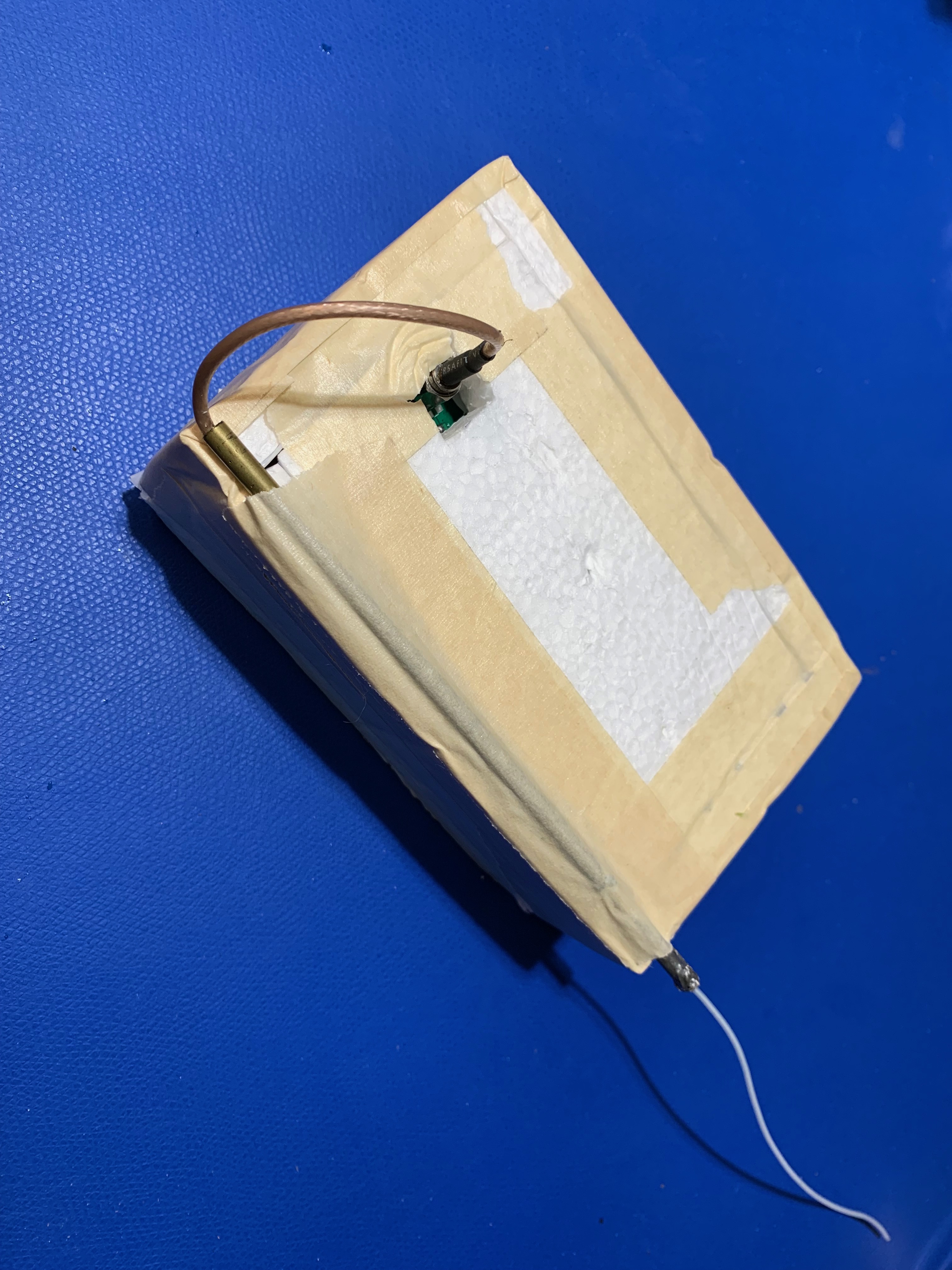
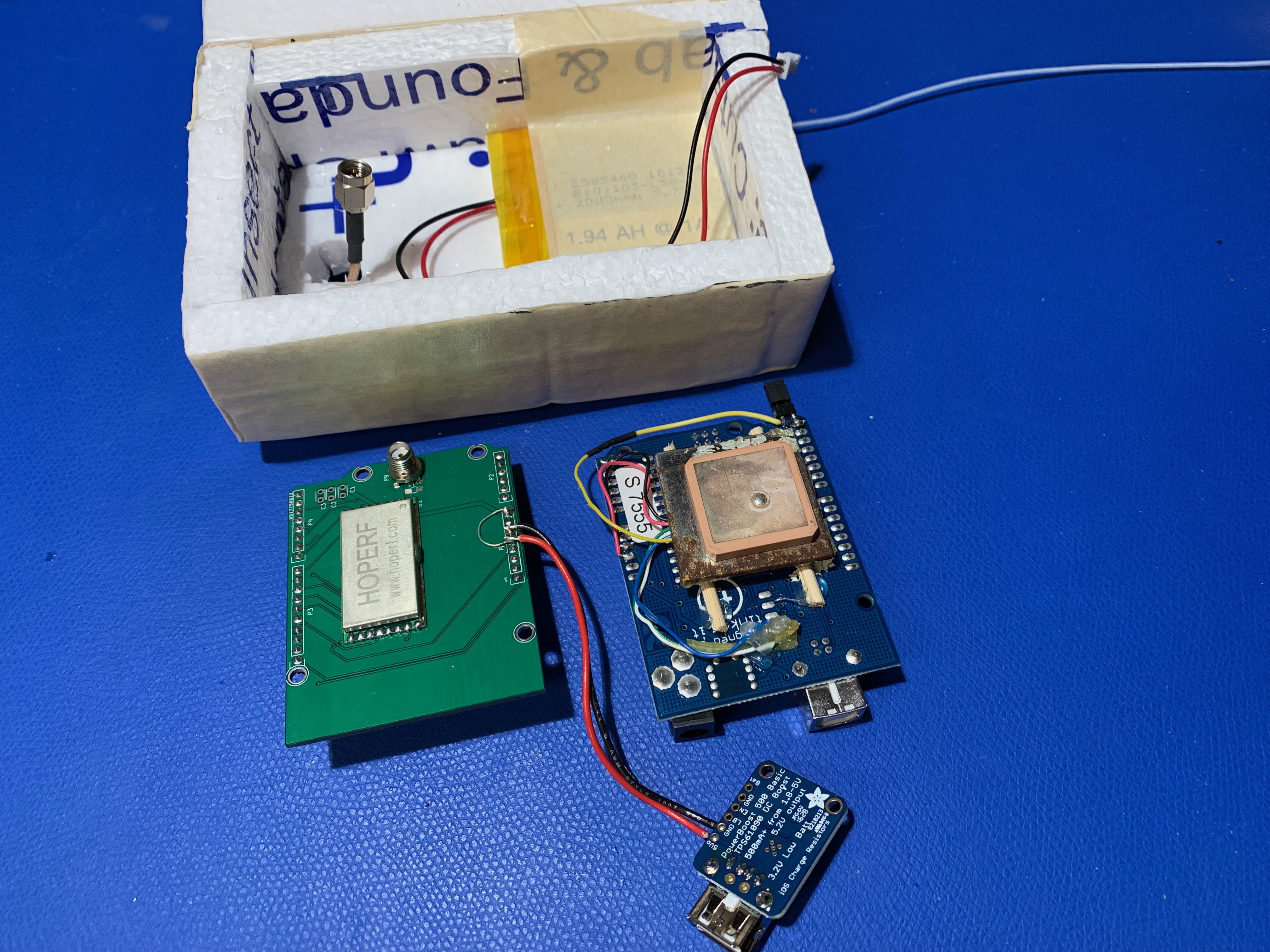
The LoRa tracker was something I’ve been interested in trying to see how it compares with our traditional APRS systems, as I’ve heard success stories from folks I know in the UK doing balloon flights, and as it’s not a popular system like APRS, we can transmit more frequently without bothering others. In this case I set the transmit interval to about 15 seconds. It is possible to have multiple receivers, but it does not currently have the same built in benefit like APRS. If we wanted multiple, we would have to provide them ourselves. The module was set to 100mW transmit power, and configured for a slower data rate to improve signal strengths. A small 1/4 wave coaxial dipole on the payload, and a simple 5/8 wave whip on my vehicle were the antennas. Performance was beyond my expectations by a fair margin. The transmissions were quite robust through the whole flight, only missing a small handful of packets, and the last position received was about 600′ above the last APRS position, which had the help of additional dispersed receivers. It’s not hard to imagine with another receiver located ahead of time at the predicted landing area, we could have gotten an even lower position during the descent.

The Raspberry Pi and camera were configured to take a photo every 5 seconds, and performed well, returning some nice images during the flight. The only trouble was some hazy conditions from a nearby wildfire.






Hi Nigel, very interesting project; just wonder a conclusion, so do you thing LoRa or LoraWAN its better than APRS ?
I don’t know that I’d say “better”, but it’s definitely a good option. APRS has the advantage of a large number of listeners, even if you don’t hear/decode a given packet, someone else likely will, which is very helpful for tracking. At the same time it’s a shared resource, which means we need to be careful to limit our transmit power, frequency, and pathing to be good neighbors. It also somewhat restricts how much data we’re effectively able to get down. A few small telemetry fields beyond the standard position data are workable, large amounts of data are problematic. LoRa moves us to our own space, we can transmit as much as we want, as fast as we want, but if we don’t hear a given packet, nobody else is going to help us. Particularly in hilly/mountainous places, where line of sight could be obscured, the help APRS provides in this regard can be invaluable. If you’re in a flat area, or can potentially put a friend/colleague near the expected destination with another LoRa receiver, that could be a very useful and workable system.